2018.02.17
Workshop C
Workshop C
大規模災害時のソーシャルメディア活用に関するワークショップ
2018.10.06 -2018.11.26
Workshop B
Workshop B
復興知拠点形成のための地域間人材交流ワークショップ
2016.05.04 -2016.9
Workshop C
Workshop C
Nudge Unitにおいて実証した学際研究プロジェクトの研究スコープ設計ワークショップ
2013.05.18 -2013.5.19
Workshop A Large
Workshop A Large
科学技術戦隊ワークショップ mission:02
2013.02.23 -2013.2.24
Workshop A Large
Workshop A Large
科学技術戦隊ワークショップ mission:00
2018.05.25 -2018.12.14
Workshop B
Workshop B
飛騨市における鳥獣被害対策を考える産官学連携ワークショップ
2018.02.17
Related Activity
Related Activity
Workshoppers2018 Report【2018 2月17日(土)開催】
2013.06.10
Workshop A Small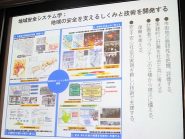
Workshop A Small
都市防災におけるICT技術の活用事例
2017.05.12 -2017.05.14
Workshop A Small
Workshop A Small
GCL合宿2017
2013.04.08
Workshop A Small
Workshop A Small
Ice Break 01
2018.01.19 -2018.03.30
Workshop B
Workshop B
2018年度GCL合宿計画
2021.10.15
Workshop C
Workshop C
未来志向の卸売市場を考えるワークショップ
2013.12.11
Workshop A Small
Workshop A Small
ICT技術を活用した、地域活性化を目指したコンサルティング事業
2016.07.23 -2016.08.09
Workshop A Large
Workshop A Large
こども向けメディア教育コンテンツ開発WS
2019.12.01
Workshop C
Workshop C
直感 vs. 最適化
2016.11.05 -2016.12.03
Workshop C
Workshop C
マインドフルネスを用いた月経随伴症状低減プログラム開発WS
2014.11.15 -12.07
Workshop A Large
Workshop A Large
学園祭を盛り上げる、近距離無線通信技術を用いたスマートフォン向けサービス開発
2015.05.08 -2015.05.10
Workshop A Small
Workshop A Small
May Camp, 2015
2018.11.03
Workshop A Medium
Workshop A Medium
あなたの名所ものがたり 家族編2018
2016.10.01
Workshop A Medium
Workshop A Medium
Dialogue to diagram 2:対話を図解する手法を学ぶ
2019.06.29 -2019.07.28
Workshop B
Workshop B
Media Landscape Without Apple 2019
2015.06.19
Workshop A Small
Workshop A Small
森の音でつながる都市と農山村
2014.10.31 -2015.03.02
Workshop B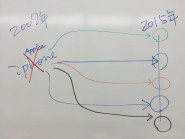
Workshop B
Wearable 2015: Media Landscape without Apple
2018.12.15
Workshop C
Workshop C
オンライン・メンタルヘルス支援サービス「ココロ・ストレッチ」体験ワークショップ
2015.09.12
Workshop A Small
Workshop A Small
第9回文京区「子ども科学カレッジ」 ぼくらの都市(まち)のつくり方
2017.12.25
Workshop C
Workshop C
Workshop on Autonomous Driving
2019.01.14
Workshop C
Workshop C
VR展示に関わるオペレーションについてのワークショップ
2015.09.25
Workshop A Medium
Workshop A Medium