diff robot_software
This workshop was held at a robotic hardware company. The software
architecture of next generation robotics is more closer to the field
of tech companies rather than hardware vendors. This gap between software and hardware is what makes building software on next generation robotics a difficulty for the hardware companies. But what exactly is this gap?
The workshop aims to figure out this gap through a panel discussion on topics organized by the facilitator, followed by a coding tutorial on latest robotic software. We find that the gap is not about understanding the components required for the software nor understanding how the components are connected. The actual gap may be the lack of software examples showing how the connected components run a complex robotic software.
企画の背景
日本において日常生活空間で活躍する次世代型の多機能ロボット(
なお、本ワークショップの参加者にはこういったロボットソフトウ
どんなワークショップ?
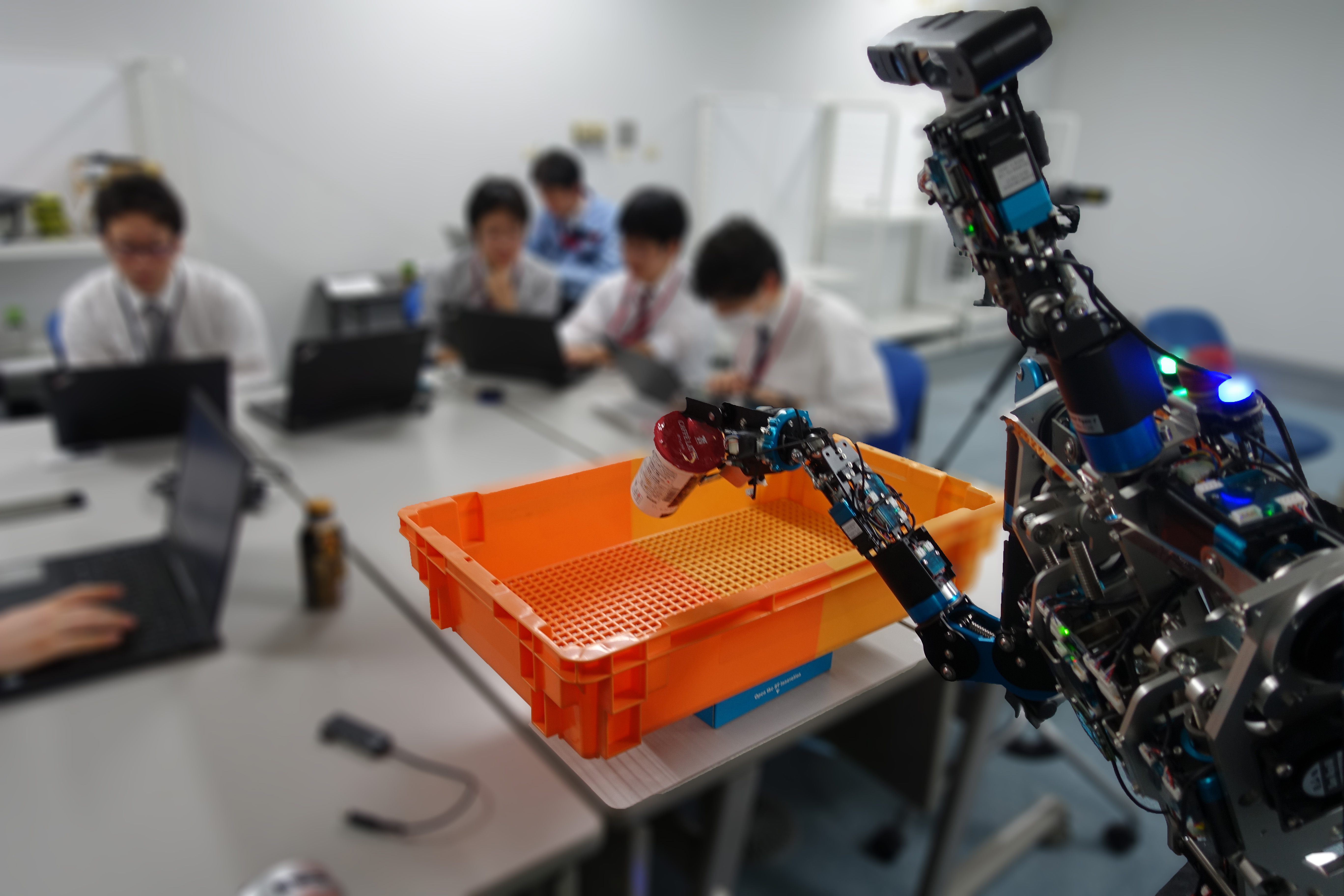
本ワークショップは前半と後半に分かれ、前半ではより多くの部署
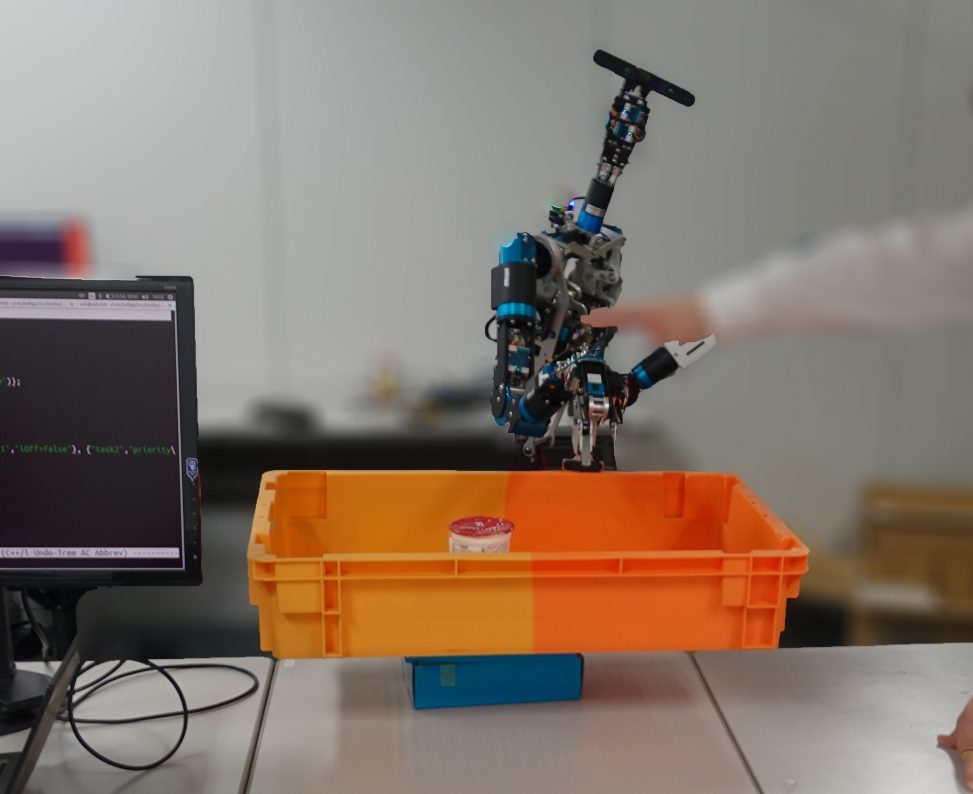
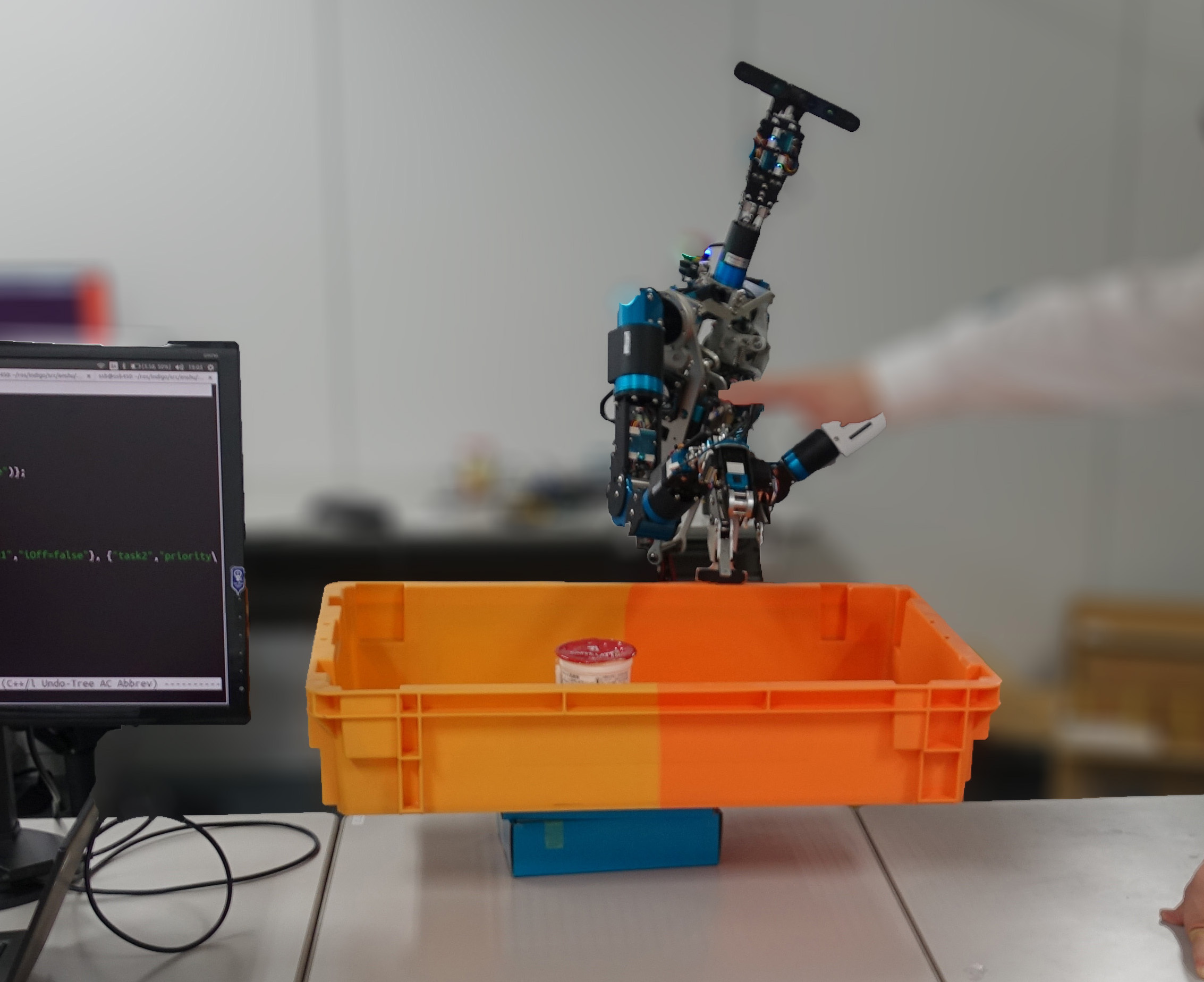
ワークショップ後半では少人数で実際にロボット開発用システムに

プログラム
| 5min | introduction | |
|---|---|---|
| 40min | panel discussion | |
| 10min | closing | |
| 60min | lunch break | |
| 120min | workshop setup | |
| 120min | instruction on software installation | |
| 90min | experience software and coding |
ワークショップの成果
まず、参加者側からみた本ワークショップの成果を述べる。このワ
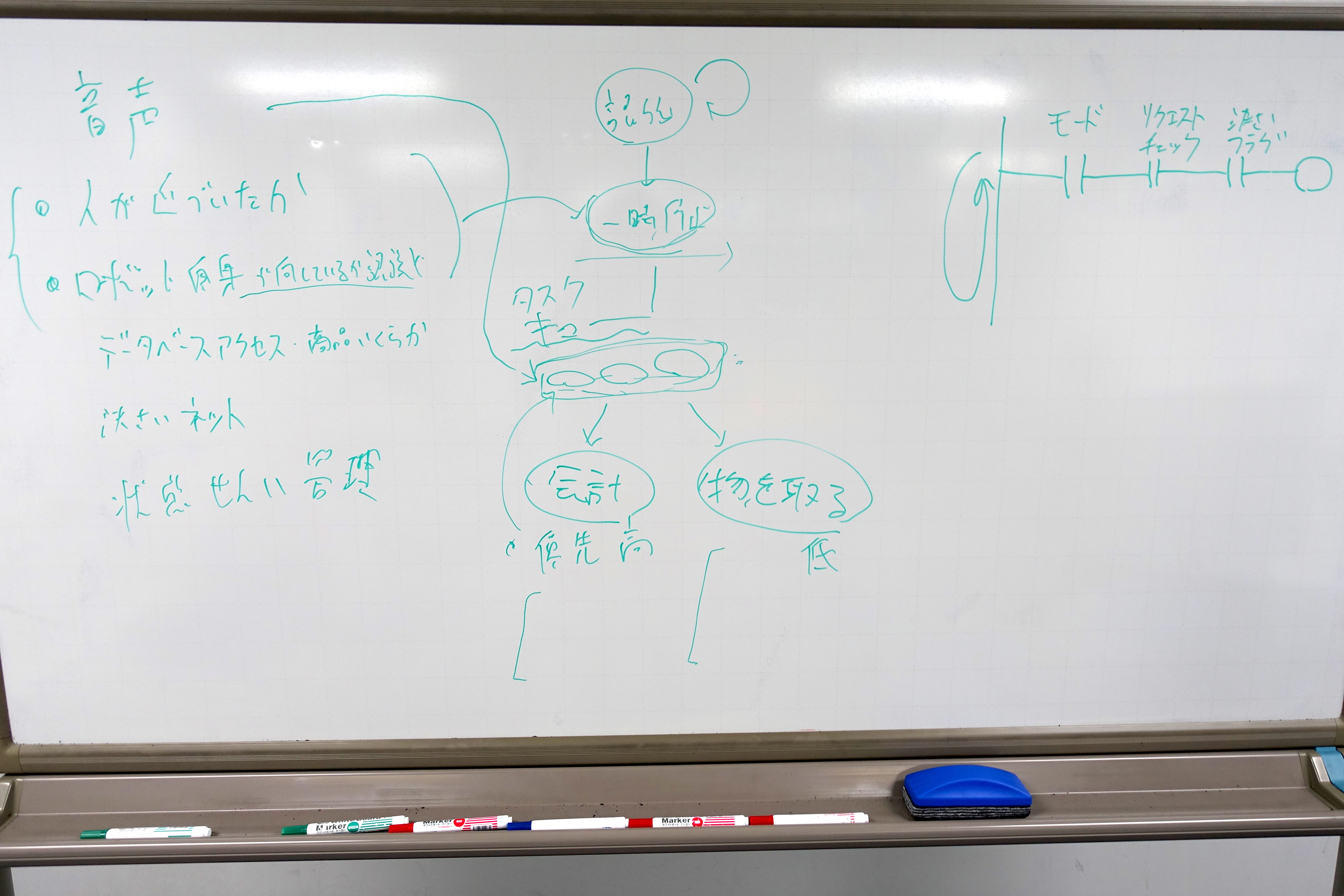
次に、主催側からみた成果を述べる。まず、企画段階で想定してい
後半のワークショップではまさにこの分岐をほぼ自分で書かなくて
ふり返り
前半と後半のワークショップを通してひとつの答えに辿り着いたこ
一方で、進行についてはいくつか改善点がある。特に、ワークショ
| アイテム | ホワイトボード、マーカーペン、ロボット一台(後半)、各自PC(後半) |
|
|---|---|---|
| 開催日時 | 2018年3月28日 |
|
| 場所 | 共同企業先 |
|
| 参加者・人数 | 前半10人、後半5人 |
|
| 講師/ファシリテーター | 笹渕一宏(知能機械情報学専攻) |
原稿執筆:笹渕一宏